Implement the robot to replace human operation for packing or clamping zip lock bags from production machine with a belt conveyer to a plastic container.
Previous Robot Model, the robot was designed with motor actuators and pneumatic system.
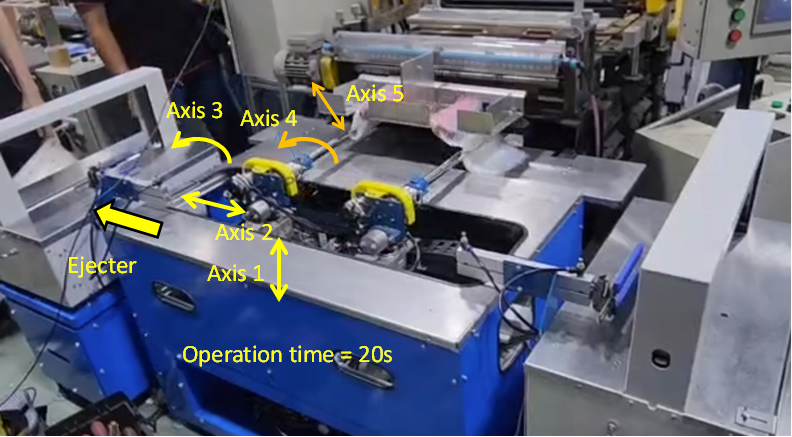
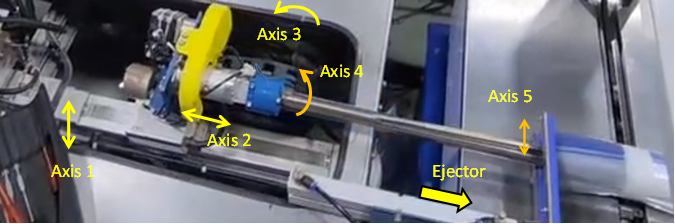
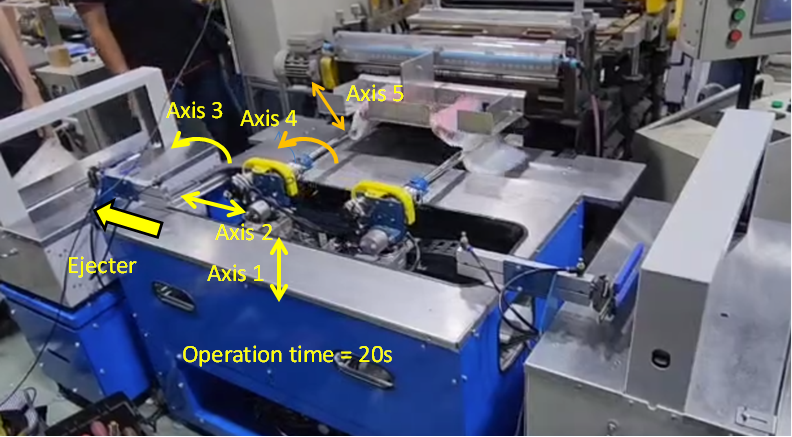
From previous model, axis 1 is used for lift the robot arm up and down, this could be hydraulic, pneumatic, or servo with linear mechanism. The axis 2 is linear motion with ball screw and linear guide which normally driven by a servo motor. The axis 3 is rotating the arm from the conveyor to the clamping machine. The axis 4 mechanism is look like a stepping motor to rotate the gripper. The axis 5 should be mechanism driven by pneumatic to grip the bags.